Invariant Conditioning for Learning
Our main insight for improving estimation is in conditioning
representation.
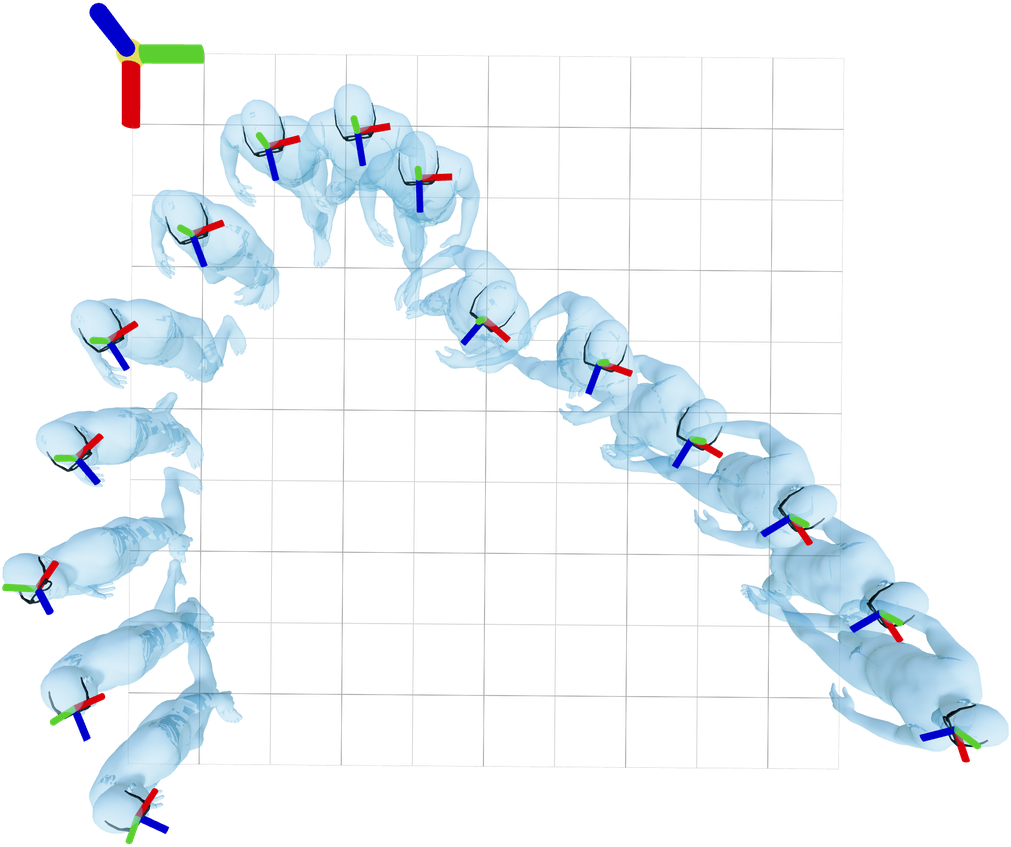
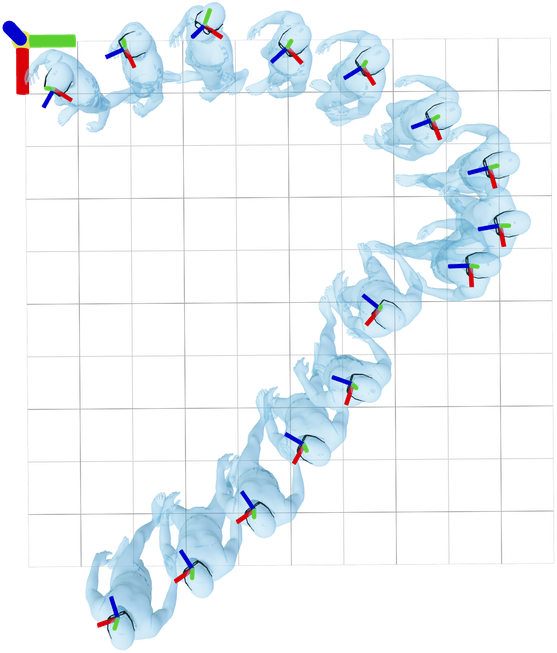
We aim to condition a human motion prior on head motion. Naively
conditioning on absolute poses, however, would introduce sensitivity to
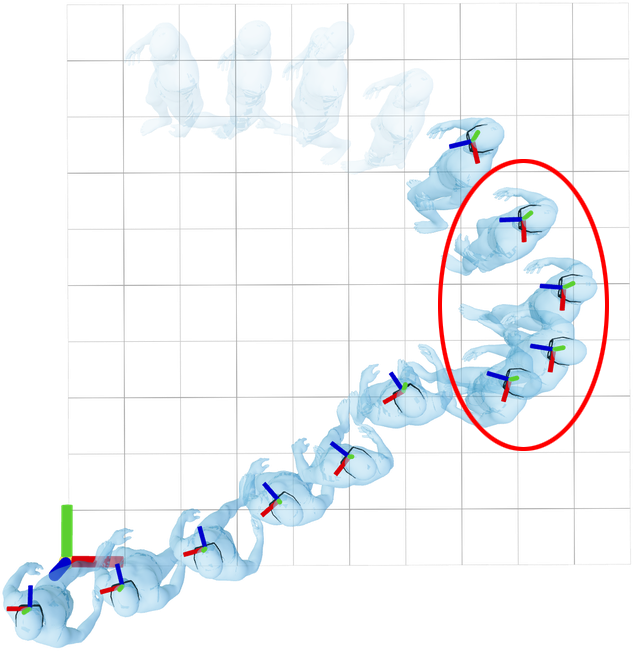
arbitrary world frame choices. Consider these trajectories, which have
identical local body motion but completely different absolute head
poses:
Training a model using these poses as conditioning would result in poor
generalization, as inputs become susceptible to infinite possible world
frame shifts.
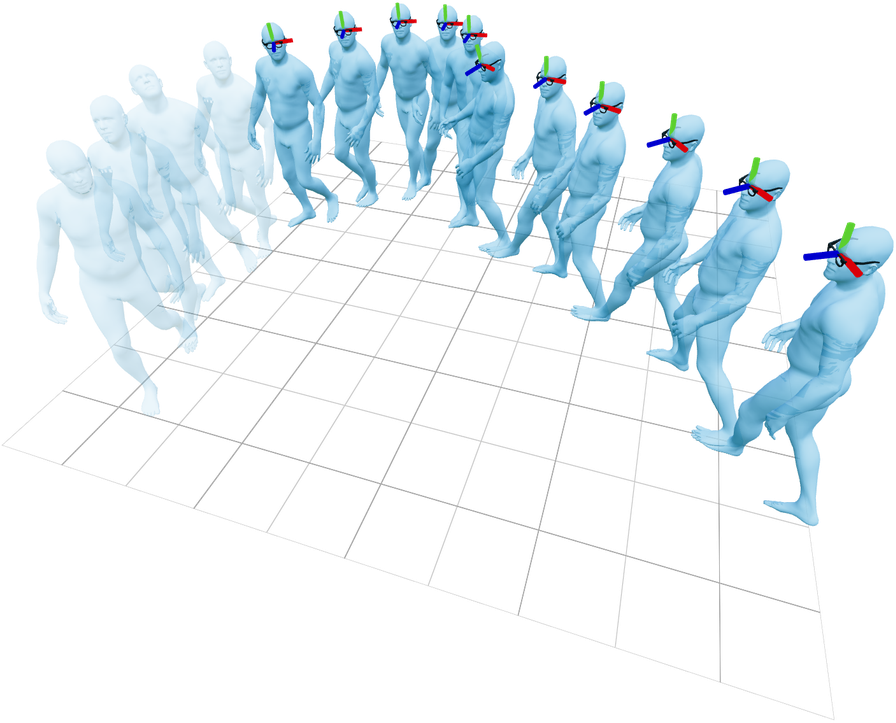
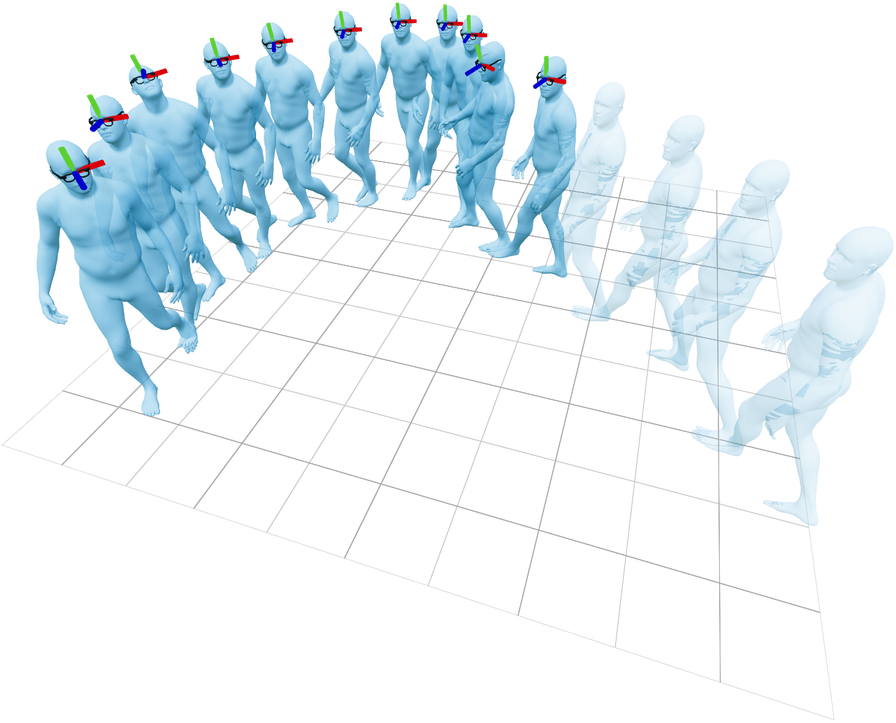
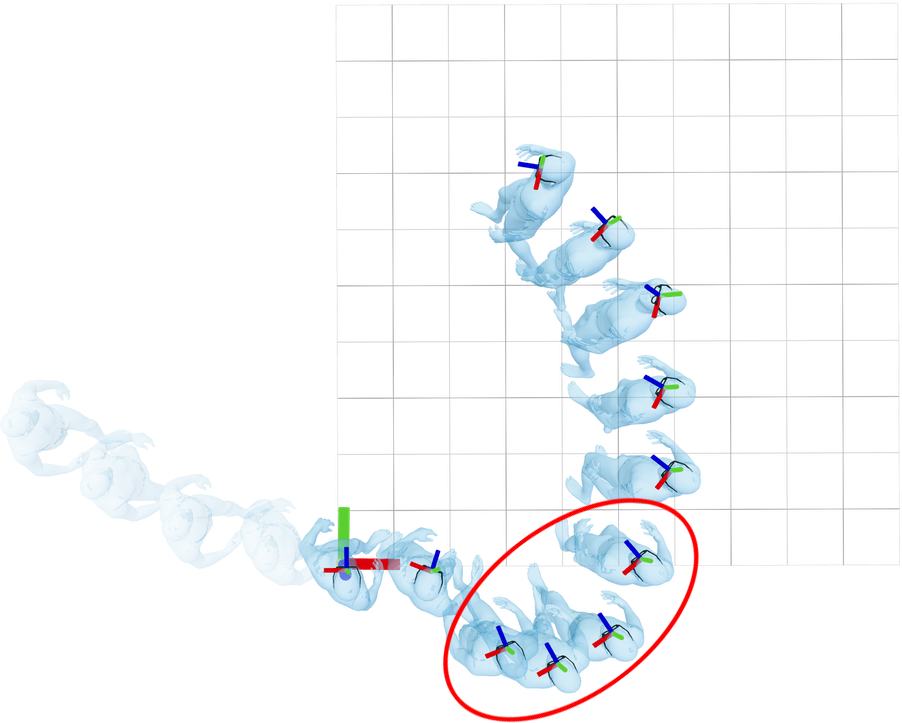
Prior works have solved this by aligning trajectories with their first
frame. We observe, however, that canonicalizing sequences this way leads
to sensitivity to
time. Consider two slices of the same motion:
Head poses from canonicalized sequences can still differ significantly,
even for the same body motion (circled):
This also hinders generalization: networks must "re-learn" outputs for
each slice of the input.
Motivated by this, our paper proposes (1) spatial
and temporal invariance properties that are desirable for head pose
conditioning, and (2) an alternative
parameterization that achieves them.
Using the central pupil frame (CPF) to measure head motion, our
invariant parameterization couples relative CPF motion
$\Delta\mathbf{T}_\text{cpf}^t$ with per-timestep canonicalized
pose $\mathbf{T}_{\text{canonical},\text{cpf}}^t$.

These transformations have improved invariance properties over prior
methods, while fully defining head pose trajectories relative to the
floor plane.
Quantitatively, this explains joint position estimation error
differences between 5% and 18%.
Qualitatively, we observe better estimated motion. For example, see the
improvements in foot motion for this dynamic sequence:
Trajectory source: EgoExo4D, unc_soccer_09-22-23_01_27.
We also present qualitative results compared to ground-truth, compared
to baselines, and when we draw multiple samples from the diffusion
model:
Hand Guidance
At test time, we incorporate visual hand observations via diffusion
guidance.
First, we extract hand observations using
HaMeR and optionally
Aria's
wrist and palm estimator.
In each denoising step, we then guide sampling using both 3D and
reprojection-based costs. Our Levenberg-Marquardt optimizer for doing so
is much faster than gradient-based approaches:
Guidance Optimizer Runtime, RTX 4090

The optimizer is implemented in Python, with autodiffed sparse
Jacobians. If you're interested, see our
code release and
library jaxls!
With our guided sampling approach, we observe that jointly estimating
human hands with bodies (purple)
reduces ambiguities when compared to single-frame monocular estimates
(blue):
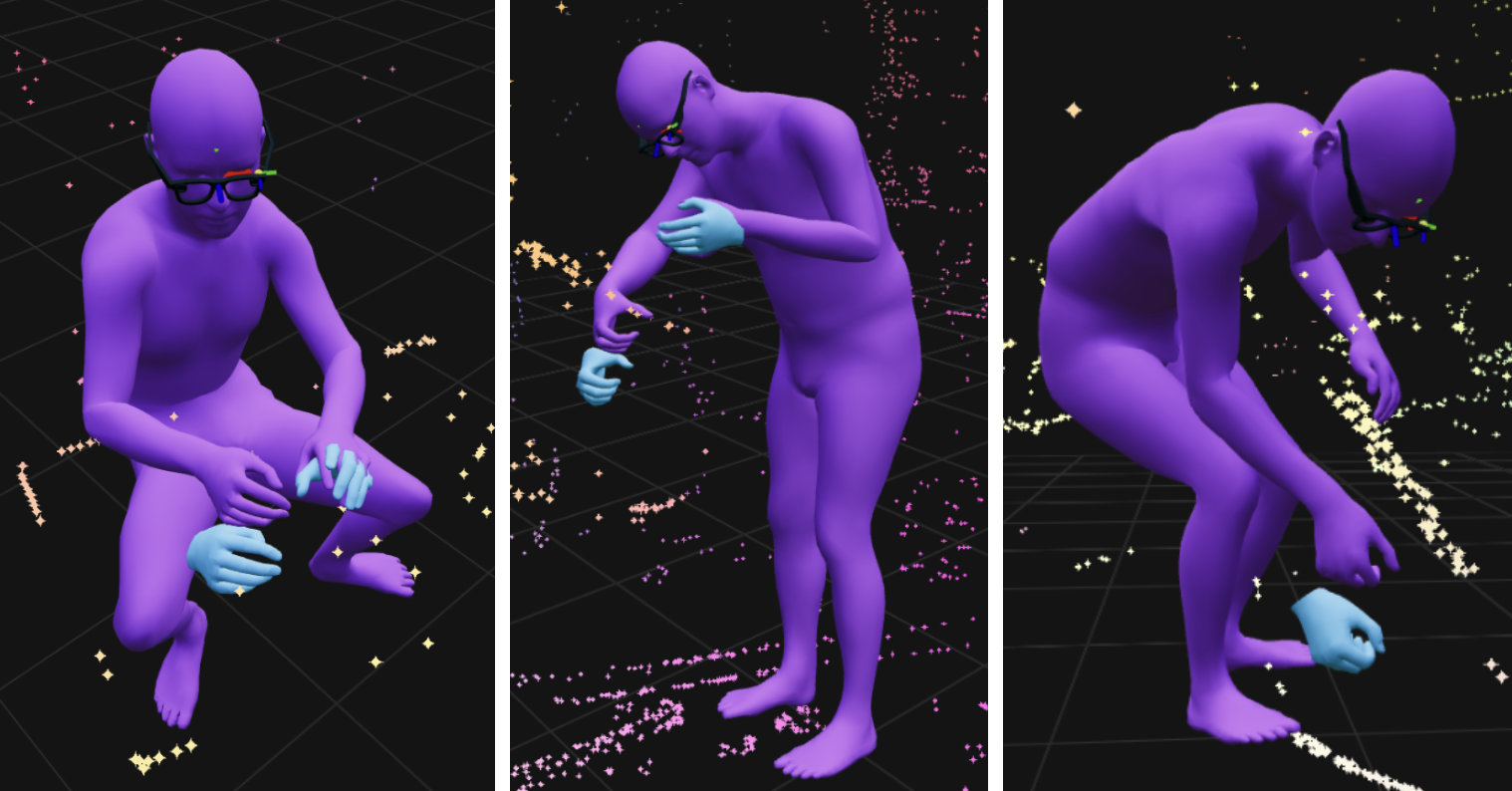
Compared to naive HaMeR, EgoAllo with head pose + HaMeR input drops
world-frame hand joint errors by as much as 40%.
Acknowledgements
We would like to thank Hongsuk Choi, Michael Taylor, Tyler Bonnen,
Songwei Ge, Chung Min Kim, and Justin Kerr for insightful technical
discussion and suggestions, as well as Jiaman Li for helpful answers to
questions about EgoEgo.
This project was funded in part by NSF:CNS-2235013 and IARPA DOI/IBC No.
140D0423C0035. YM acknowledges support from the joint Simons
Foundation-NSF DMS grant #2031899, the ONR grant N00014-22-1-2102, the
NSF grant #2402951, and partial support from TBSI, InnoHK, and the
University of Hong Kong. JM was supported by ONR MURI N00014-21-1-2801.
BY is supported by the National Science Foundation Graduate Research
Fellowship Program under Grant DGE 2146752.